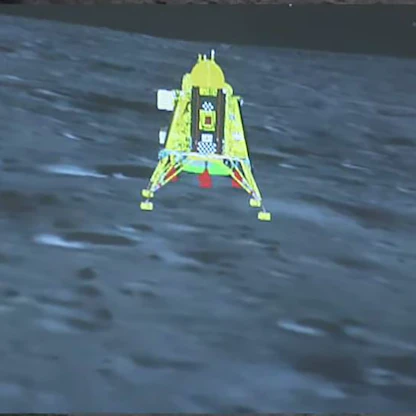
اتخذت مركبة فضائية يابانية خطوة كبيرة نحو تحقيق أول هبوط لليابان على سطح القمر، بعد أن أعلنت وكالة استكشاف الفضاء اليابانية، الاثنين، وصول مركبة الهبوط القمرية الآلية SLIM، إلى مدار القمر في يوم عيد الميلاد كما كان مخططاً.
وقال مسؤولو وكالة استكشاف الفضاء اليابانية، إن مركبة الهبوط الذكية لاستكشاف القمر (SLIM) دخلت بنجاح مدار القمر في تمام الساعة 16:51 بالتوقيت المحلي الياباني (07:51 بتوقيت جرينتش).
وحالياً، تدور المركبة الفضائية في مدار بيضاوي الشكل يستغرق 6.4 ساعة للدوران حول القمر، إذ تصل إلى مسافة 600 كيلومتر من سطح القمر عند أقرب نقطة للمدار، و4 آلاف كيلومتر في أبعد نقطة.
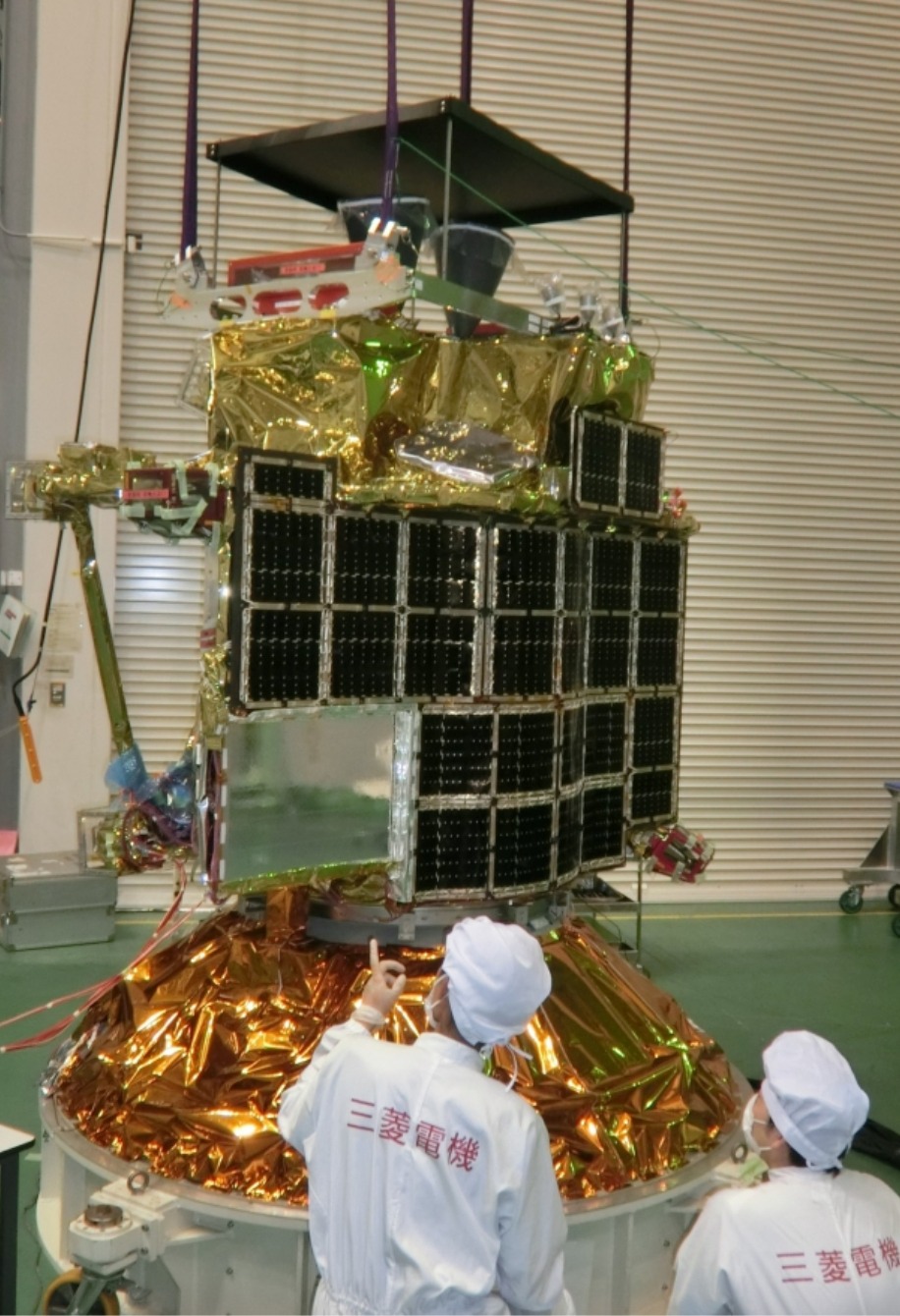
تم إطلاق المركبة الذي يبلغ طولها 2.7 متر في 6 سبتمبر الماضي، مع تلسكوب XRISM الفضائي القوي للأشعة السينية.
تم نشر كلتا المركبتين الفضائيتين اليابانيتين في مدار الأرض، ولا يزال التلسكوب في مدار الأرض، لكن المركبة تركت جاذبية كوكب الأرض في 30 سبتمبر، لتبدأ طريقاً طويلاً وغير مباشر وموفراً للطاقة إلى القمر.
وانتهت هذه الرحلة، الاثنين، عندما أدخلت المركبة نفسها في مدار القمر، والتي ستبدأ في استخدام تقنيات الهبوط الدقيقة للنزول في منطقة لا يزيد طولها عن 100 متر فقط.
وقال مسؤولو وكالة استكشاف الفضاء اليابانية، إن المركبة "هي مهمة للبحث في تكنولوجيا الهبوط الدقيق اللازمة للمسابير القمرية المستقبلية والتحقق من ذلك على سطح القمر باستخدام مسبار صغير الحجم"، في حين يُعد استخدام تقنية الهبوط الدقيقة هاماً للغاية لنجاح المسابر القمرية القادمة.
أساليب هبوط جديدة
مركبة الهبوط القمرية اليابانية المبتكرة ليست مجرد مركبة فضائية أخرى، فهي تمثل قفزة محورية نحو تحقيق نظام مسبار خفيف الوزن على نطاق صغير، كل ذلك مع تسخير الدقة اللازمة للهبوط على الأجرام السماوية شحيحة الموارد.
ويدور الجوهر الأساسي لمشروع المركبة اليابانية حول تجاوز القيود المفروضة على أساليب الهبوط السابقة. تاريخياً، غالباً ما تم تحديد مناطق الهبوط على سطح القمر ضمن مساحة شاسعة، وليس الاختيار المتعمد، وهو نموذج من المقرر أن يتغير بشكل كبير مستقبلاً.
يقول العلماء إن الطموح وراء المركبة اليابانية هو تمكين البشرية من الهبوط في منطقة مُحددة حيث يتجه البحث العلمي، وليس فقط في الأماكن الأكثر ملاءمة لعملية الهبوط، وهو تقدم ثوري في قدرتنا على استكشاف الكون.
وأصبح الطلب على عمليات الإنزال عالية الدقة المتاخمة لمواقع الدراسة المستهدفة ضرورة حتمية.
سمحت التطورات في بيانات مراقبة القمر عالية الدقة للعلماء والباحثين بفحص الصخور الفردية ضمن صور محددة لسطح القمر. يتطلب هذا التحليل التفصيلي جمع ملاحظات من الموقع، إذ تحتاج المركبة الفضائية إلى الهبوط بدقة على التضاريس المسطحة القريبة لدراسة هذه الصخور الفردية عن قرب.
وتصبح أهمية الهبوط الدقيق واضحة عند النظر في تعقيدات الوصول إلى مواقع محددة ذات أهمية علمية على سطح القمر. قد يتضمن ذلك استكشاف الصخور أو الحفر التي لها خصائص فريدة، أو تظهر عليها علامات ذات أهمية جيولوجية. غالباً ما تتطلب هذه المواقع مستوى عالٍ من الدقة في هبوط المركبات الفضائية، لتسهيل الدراسات والتحقيقات في الموقع.
مواصفات المركبة اليابانية
تملك المركبة الجديدة محرك ثنائي الدفع صغير يولد حوالي 20 نيوتن من الدفع؛ وتضم المركبة الفضائية 12 من هذه الوحدات، لاستخدامها في صناعة أنماط دفع مختلفة لتوليد قوى انتقالية ودورانية. تساعد هذه القوى بالتحكم في الموقف والمناورة المدارية والهبوط الدقيق.
كما تحتوي المركبة على خزان صغير غرضه تخزين الوقود الدفعي والمؤكسد المستخدم، وهو بمثابة القاعدة الهيكلية للمركبة الفضائية، مما يساهم بشكل كبير في تقليل الكتلة الإجمالية.
واستخدم العلماء غشاءً خفيف الوزن مصنوع من مادة بوليمرية مطورة حديثاً على الجانب المؤكسد للخزان؛ بهدف تقليل وزنه الإجمالي.
أما المحرك الرئيسي فهو ثنائي الدفع من فئة 500 N. ويُستخدم للتحكم المداري وتنظيم السرعة أثناء الهبوط على سطح القمر. يشتمل هذا المحرك على غرفة احتراق سيراميكية مطورة محلياً، مما يتيح مزيجاً فريداً من "نطاق الدفع الواسع والتشغيل النبضي". ويساهم أدائها العالي بشكل كبير في تقليل كتلة نظام الدفع.
أما رادار الهبوط، فقد تم تصنيعه بواسطة شركة "ميتسوبيشي"، ويعمل كجهاز استشعار يستخدم لقياس الارتفاع والسرعة أثناء الهبوط الرأسي للمركبة الفضائية نحو سطح القمر. ويصدر الرادار نبضات موجات صغيرة موجهة نحو سطح القمر، ويقيس زمن الرحلة ذهاباً وإياباً. يتميز هذا الرادار بأوضاع متعددة بعرض نبضي متفاوت، ويعمل في نطاق يتراوح من عدة كيلومترات إلى عشرات الأمتار في الارتفاع.
كما زود العلماء المركبة بكاميرا ملاحية طورتها شركة "ماياسي"، وهي عبارة عن جهاز تصوير مدمج وخفيف الوزن يستخدم أثناء مرحلة الهبوط. وتستطيع الكاميرا التقاط صور لسطح القمر، كما توفر صوراً عالية الجودة لعملية الملاحة القائمة على الرؤية. وتم تركيب كاميرتين في اتجاهات مختلفة، يتم استخدام كل واحدة منهما خلال مراحل مختلفة من الهبوط، واحدة أثناء الهبوط الآلي والأخرى أثناء الهبوط العمودي.
كما تحتوي المركبة على محدد المدى بالليزر، وهو عبارة عن مستشعر موجات بصري يستخدم لقياس الارتفاع بدقة قبل الهبوط على سطح القمر؛ ويعمل عن طريق استقبال ضوء الليزر المعدل المنعكس من سطح القمر لحساب المسافة.
ويقوم كمبيوتر متكامل مُدمج في المركبة بجميع الوظائف الحسابية اللازمة للتحكم؛ وهو ما يمثل ميزة بارزة، إذ يتم التعامل مع كل من نظام معالجة البيانات وحسابات نظام التحكم في الملاحة والتوجيه بواسطة وحدة واحدة داخل المركبة. أما جهاز الإرسال والاستقبال المدمج، فيشتمل على ميزات تصميم متقدمة، مثل الرقمنة التي ستمكنه من إجراء الاتصالات بسرعة أعلى بكثير.
ولتحقيق التصغير وخفة الوزن في التصميم، استخدم العلماء خلايا بطارية صفائحية مع غلاف خارجي مصنوع من الفولاذ المقاوم للصدأ، وتم ربط هذه الخلايا بألواح من البلاستيك المقوى بألياف الكربون لتحمل اهتزازات الإطلاق والتأثيرات والشحن والتفريغ الفراغي؛ كما تم دمج صفائح الخلايا الشمسية ثلاثية الوصلات ذات الأغشية الرقيقة المرنة خفيفة الوزن وعالية الكفاءة، وتثبيتها على أسطح منحنية باستخدام تقنية توصيلية مبتكرة.
وتضم المركبة وحدة للتحكم المتكامل في الطاقة، تعمل على دمج الوظائف المختلفة، بما في ذلك شحن البطارية وتفريغها، وتنظيم توليد الطاقة الشمسية، وتوزيع الطاقة، ووظائف التحكم لتشغيل الصمام الدافع والتحكم في السخانات الشمسية. يؤدي استخدام التحكم الرقمي إلى تحسين الأداء الوظيفي لتلك الوحدة، وتقليل الوزن مقارنة بأجهزة التحكم التناظرية التقليدية.
والمركبة مزودة مزود بآلية لامتصاص الصدمات أثناء الهبوط، ولها 5 أرجل لمس تتميز بأنماط شبكية من الألومنيوم مصممة لامتصاص الصدمات بكفاءة، باستخدام تقنية الطباعة ثلاثية الأبعاد.
وتم تطوير الكاميرا الطيفية متعددة النطاقات لفحص تكوين الصخور المحيطة بعد الهبوط، بهدف كشف أسرار تكوين القمر.

وساهمت هذه المكونات مجتمعة في تصميم مركبة فضائية خفيفة الوزن، قادرة على المناورة الدقيقة والتحكم في الموقف، وإجراء عمليات رصد مستهدفة على سطح القمر. ويقول علماء وكالة الفضاء اليابانية إن دمج هذه المعدات المتقدمة والمصممة بدقة يجسد التقدم التكنولوجي الذي يهدف إلى تعزيز فعالية مهام استكشاف القمر.
كيف ستهبط المركبة؟
ومن المخطط أن تهبط المركبة على سطح القمر في 19 يناير المقبل. وفي حالة نجاح الهبوط؛ ستنضم اليابان إلى قائمة مكونة من 4 دول فقط نجحوا في الهبوط على سطح القمر وهي روسيا والولايات المتحدة والصين والهند.
وسيبدأ الهبوط من المدار القمري، باستخدام الملاحة الدقيقة القائمة على الرؤية لتحديد موقعه بدقة. تقوم أنظمة الملاحة والتوجيه والتحكم بتوجيه المركبة نحو الموقع المستهدف فوق سطح القمر.
وبمجرد وضعه فوق الموقع المستهدف، يقوم رادار الهبوط المدمج في نظام الملاحة والتوجيه بقياس الارتفاع والسرعة النسبية للتضاريس بدقة.
وأثناء المرحلة النهائية للهبوط، يكتشف نظام المركبة العوائق، ويتجنبها بشكل مستقل من خلال الكشف عن العوائق المستندة إلى الصور، مما يضمن الهبوط الآمن عن طريق تجنب الصخور الخطرة والعوائق الأخرى.
وتستخدم المركبة نظاماً يُسمى "التنقل القائم على الرؤية" لتحديد مواقع الحفرة ومطابقتها بخريطة واسعة، مما يتيح الهبوط الدقيق. تم تحسين وقت المعالجة لتلك المهمة للسماح بإجراء حسابات سريعة في غضون ثوانٍ.
بعد الهبوط، تهدف المركبة إلى تحليل تركيبة الصخور من الوشاح القمري، باستخدام كاميرا طيفية متعددة النطاقات للكشف عن أصول القمر؛ وتعتبر الملاحظات الدقيقة في محيط الحفرة المستهدفة ضرورية لهذه المهام العلمية.
كما أن تعزيز قدرات المراقبة في مجسات أبحاث النظام الشمسي المستقبلية يتطلب إعادة تصور أنظمة المسبار.
ولتلبية هذه المتطلبات المتطورة، هناك جهود متضافرة لتخفيف حمولة المجسات ووزنها، وهي مناورة حاسمة تسمح بإعادة توزيع الموارد نحو أدوات المراقبة المتقدمة.

ويهدف المسبار الياباني الجديد إلى قيادة هذا التطور؛ من خلال صياغة نظام مسبار صغير الحجم وخفيف الوزن، مدعوماً بتكنولوجيا الهبوط الدقيق، وهي مساهمة محورية في العصر الوشيك للمسابير القمرية وبين الكواكب.
إذا سارت الأمور وفقاً للخطة، فسوف يقوم المسبار الياباني أيضاً بنشر مسبارين صغيرين على سطح القمر بعد الهبوط.
وستلتقط هذه المركبة الصغيرة الصور، وتساعد أعضاء فريق المهمة على مراقبة حالة المسبار الأصلي، وتوفير نظام اتصال مستقل للتواصل المباشر مع الأرض؛ كما كتب مسؤولو وكالة الفضاء اليابانية.
وتلك ليست أول مركبة فضائية يابانية تصل إلى مدار القمر؛ إذ قام مسبار "هايتن" بذلك في عام 1990، وتلاه مسبار "سيلين" في عام 2007.
كما وصلت مركبة الهبوط "هاكوتو أر" إلى مدار القمر في مارس الماضي؛ لكنه فشل في الهبوط نتيجة خلل في أجهزة الاستشعار الخاصة به، بسبب حافة حفرة قمرية.