القاهرة -
طور مهندسون في جامعة ديوك الأميركية روبوتا مختلفاً في شكله وقدراته، لا يملك مقدمة أو مؤخرة، ولا يحتاج إلى أن "يستدير" حتى يتحرك في اتجاه جديد؛ لأنه يحتوي على 20 ساقاً مزودة بكاميرات، موزعة حول جسمه بطريقة تجعله يرى ويتحرك تقريباً في كل الاتجاهات بالكفاءة نفسها.
يعتمد تصميم الروبوت الذي يحمل اسم "أرجوس"، على مبدأ جديد أطلق عليه الباحثون "التناظر الديناميكي" يقوم على فكرة بسيطة في ظاهرها وعميقة في تطبيقها؛ معتبرين أن الأهم في الروبوت ليس أن يشبه الإنسان أو الكلب أو الحشرة، بل أن يكون قادراً على التصرف والحركة بصورة متوازنة في جميع الاتجاهات.
على مدى عقود، حاول خبراء الروبوتات استلهام الطبيعة عبر تقليد أشكال مألوفة؛ من روبوتات شبيهة بالبشر، وأخرى رباعية الأرجل تسير كالحيوانات، إلى روبوتات تحاكي الحشرات والطائرات الصغيرة، لكن فريق جامعة ديوك يرى أن التركيز على الشكل قد يخفي سؤالاً أكثر أهمية: ماذا يستطيع الروبوت أن يفعل فعليا، وبأي درجة من الكفاءة في كل اتجاه؟
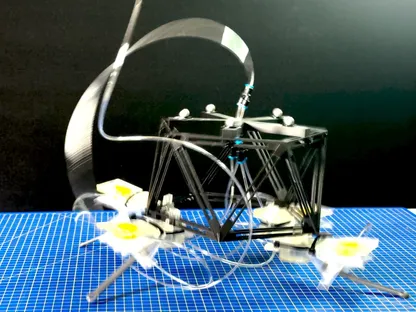
اختبر الباحثون أكثر من 1500 تكوين محتمل للروبوتات عبر المحاكاة الحاسوبية، بحثاً عن تصميم يقترب من الحد النظري الأعلى للقدرة على التسارع والحركة في جميع الاتجاهات؛ وكانت النتيجة تصميم روبوت كروي متعدد الأرجل، أقرب في مظهره إلى قنفذ البحر منه إلى الروبوتات التجارية المعتادة.
يحمل الروبوت اسم "أرجوس" والذي نشر تصميمه في دورية Science Robotics، تيمناً بالحارس ذي العيون الكثيرة في الأساطير اليونانية، والاسم ليس رمزياً فقط؛ فكل واحدة من أرجله الـ 20 مزودة بكاميرا عمق، ما يمنحه مجال رؤية شبه شامل، بالتوازي مع قدرة ميكانيكية على الدفع والحركة من جهات متعددة.
روبوت بـ 20 ساقاً و20 عيناً
يتكون "أرجوس" من نواة مركزية تخرج منها 20 ساقاً معيارية قابلة للتمدد، مرتبة عند رؤوس شكل هندسي ثلاثي الأبعاد منتظم يعرف باسم "الدوديكا" أو المجسم ذي الـ 12 وجهاً.
ويسمح هذا التوزيع بالحصول على مجال شبه موحد للتسارع في كل الاتجاهات، إضافة إلى رؤية واسعة بفضل الكاميرات المثبتة في نهاية كل ساق.
قال الباحث المشارك في الدراسة جياكسون ليو، طالب الدكتوراه في مختبر الروبوتات العامة بجامعة ديوك، إن مشاهدة "أرجوس" وهو يتحرك كانت مختلفة عن أي روبوت عملوا عليه من قبل.
وأضاف: "أدرك فريق البحث منذ التجارب الأولى بين الأشجار، وعلى التضاريس الوعرة، وحتى مع الاصطدامات القوية، أنهم أمام شيء غير تقليدي".
ولا يتعامل الروبوت مع العالم على أساس اتجاه أمامي ثابت؛ ففي الروبوتات التقليدية، غالباً ما تكون هناك جهة أمامية مرتبطة بالحركة والرؤية والتوازن؛ أما في "أرجوس" فالروبوت يستطيع إعادة توجيه نفسه فوراً تقريباً، لأن قدرته على الحركة موزعة حول جسمه بدلاً من أن تكون مركزة في اتجاه واحد.
ما هو "التناظر الديناميكي؟"
اعتمد الباحثون على مفهوم جديد يعرف بـ"الديناميكية المتناظرة" والذي يمنح الروبوت درجة من صفر إلى واحد بحسب مدى قدرته على تسريع مركز كتلته بالتساوي في جميع الاتجاهات.
وتسجل معظم الروبوتات المستخدمة حالياً، بما في ذلك الروبوتات رباعية الأرجل المتقدمة والروبوتات البشرية والطائرات المسيرة التقليدية، درجات أقل من 0.6 على هذا المقياس. أما "أرجوس" فسجل 0.91، مقترباً من الحد النظري الأعلى.
وقال الباحث الرئيسي في الدراسة بويان تشين، مدير مختبر الروبوتات العامة في جامعة ديوك، إن معظم أبحاث الروبوتات تعاملت مع التناظر كمسألة شكلية في جسم الروبوت، لكن فريق البحث يرى أن التناظر الأقوى هو تناظر ما يستطيع الروبوت فعله، موضحاً أنه عندما يتمكن الروبوت من التسارع بكفاءة متقاربة في كل اتجاه، لا يعود مضطراً إلى مواجهة العالم من زاوية محددة؛ يصبح الأمام والخلف، واليمين واليسار، فروقاً أقل أهمية بكثير.
وقد يغير هذا التحول طريقة التحكم في الروبوتات؛ فالروبوتات التقليدية تحتاج غالباً إلى تخطيط للحركة يتضمن الالتفاف، وتعديل الوضعية، واستعادة التوازن في اتجاه محدد، أما الروبوت المتناظر ديناميكياً، فيمكنه التعامل مع الحركة بوصفها استجابة موزعة في كل الجسم.

أداء على الرمال والجدران وبين الأشجار
اختبر الباحثون "أرجوس" في بيئات متنوعة داخل حرم الجامعة وخارجه، وعلى أسطح مختلفة بينها الخرسانة والعشب والنباتات الكثيفة والرمال الناعمة والأسطح الرطبة واللحاء، وأظهر الروبوت قدرة على التحرك فوق عوائق يصل ارتفاعها إلى نحو 5 بوصات، بغض النظر عن اتجاهه لحظة بدء الحركة.
وأظهر الروبوت قدرة على استعادة استقراره بسرعة بعد دفعه، وهي خاصية مهمة للروبوتات التي تعمل في بيئات غير متوقعة، وفي اختبارات أخرى، واصل الحركة حتى بعد تعطل 3 من أرجله، ما يشير إلى قدرته على تحمل الأعطال الجزئية دون فقدان وظيفته بالكامل.
ولم تقتصر قدراته على الحركة الذاتية. فقد حمل الروبوت حمولة قدرها 10 أرطال (نحو 4.5 كيلوجرام) بسرعة قريبة من سرعته الكاملة، ودفع مكعباً يبلغ حجمه 3 أقدام أثناء التدحرج المستمر، كما استطاع تسلق جدران رأسية متوازية عبر التثبيت والدفع بالتناوب باستخدام مجموعات مختلفة من أرجله.
ولا تعني هذه القدرات أن "أرجوس" جاهز فوراً للاستخدام التجاري الواسع، لكنه يقدم دليلاً عملياً على أن مبدأ التصميم نفسه يمكن أن ينتج روبوتات أكثر مرونة وقدرة على التعامل مع التضاريس الصعبة.
لماذا 20 ساقاً تحديداً؟
ولم يختر الباحثون عدد الأرجل عشوائياً؛ ففي التحليلات والمحاكاة، وجدوا أن الروبوتات ذات الأرجل الموزعة بانتظام تحقق اقتراباً من الأداء الأمثل عندما يتراوح عدد الأطراف بين 16 و22 طرفاً، ومع زيادة عدد الأرجل ترتفع القدرة على توليد القوة والتسارع في اتجاهات متعددة، لكن بعد حد معين لا تعوض الأرجل الإضافية التعقيد الميكانيكي والقيود الفيزيائية الناتجة عنها.
لذلك جاء تصميم "أرجوس" بـ 20 ساقاً بوصفه توازناً بين الأداء العالي والتعقيد المقبول، وكل ساق ليست مجرد أداة للحركة، بل تحمل أيضاً كاميرا، ما يجعل الإدراك البصري جزءاً من بنية الروبوت كلها، وليس وظيفة محصورة في "رأس" أو جهة أمامية.
ووصف الباحثون هذا الدمج بأنه اقتران بين "تحريك الجسم كله" و"إدراك الجسم كله"؛ أي أن الروبوت لا يرى العالم من نقطة واحدة فقط، ولا يتحرك من مجموعة أطراف موجهة للأمام، بل يستخدم جسده كاملاً للرؤية والدفع والتوازن.
أبعد من روبوت واحد
ولا تكمن أهمية "أرجوس" في كونه روبوتاً جديداً، بل في أنه يقدم إطاراً عاماً لتقييم وتصميم الروبوتات. فمبدأ "التناظر الديناميكي" يمكن استخدامه كمقياس رياضي للمقارنة بين أنواع مختلفة من المنصات، من الروبوتات الأرضية إلى الطائرات المسيرة والروبوتات البشرية.

قال الباحث المشارك في الدراسة، بوكسي شيا، الباحث ما بعد الدكتوراه إن "أرجوس" يمثل دليلاً على الوجود؛ أي برهاناً عملياً على أن التصميم من أجل "التناظر الديناميكي" ليس مجرد فكرة نظرية، بل يمكن أن ينتج روبوتاً قادراً على العمل في بيئات طبيعية معقدة، وربما في ظروف منخفضة الجاذبية أيضاً.
وأضاف شيا أن التصميم يظهر أهمية محتملة لتطبيقات خارج الأرض، مثل استكشاف الكواكب أو الأقمار، حيث تكون التضاريس غير معروفة، والجاذبية مختلفة، واحتمالات التعثر أو الاصطدام عالية "وفي مثل هذه البيئات، قد تكون الروبوتات التي لا تعتمد على اتجاه أمامي ثابت أكثر قدرة على النجاة والاستمرار".
عقبات أمام الروبوت
رغم النتائج اللافتة، يظل "أرجوس" في هذه المرحلة إثباتاً لمبدأ تصميم أكثر منه منتجاً نهائياً، فالدراسة تعرض قدراته في تجارب محددة، لكنها لا تجيب بعد عن كل الأسئلة المتعلقة بالتكلفة، والمتانة طويلة الأمد، وسهولة الصيانة، وكفاءة الطاقة في مهام ميدانية واسعة النطاق.
كما أن التصميم متعدد الأرجل والكاميرات قد يكون أكثر تعقيداً من الروبوتات التقليدية، ما يفرض تحديات في التصنيع والتحكم والمعالجة الحاسوبية للبيانات القادمة من كل الاتجاهات، ومع ذلك، يرى الباحثون أن القيمة الأساسية تكمن في فتح مسار جديد للتفكير في الروبوتات، بدلاً من حصر الابتكار في تحسين أشكال مألوفة.
تصنيفات