القاهرة -
طور باحثون منظومة روبوتية جراحية صغيرة ومتعددة الأذرع قد تمهد لتخفيف ضغط الأعصاب في عمليات العمود الفقري، وهي إجراءات تستخدم لعلاج بعض حالات آلام أسفل الظهر الناتجة عن ضغط الأقراص أو الأنسجة المحيطة على الأعصاب.
وأظهرت اختبارات قبل سريرية، نشرتها دورية Science Robotics، إلى جانب تجارب على نماذج بشرية محفوظة، أن الروبوت الجديد قادر على المناورة داخل المساحات الضيقة بين فقرات أسفل الظهر، مع اختصار زمن الإجراء مقارنة بالطرق الجراحية التقليدية.
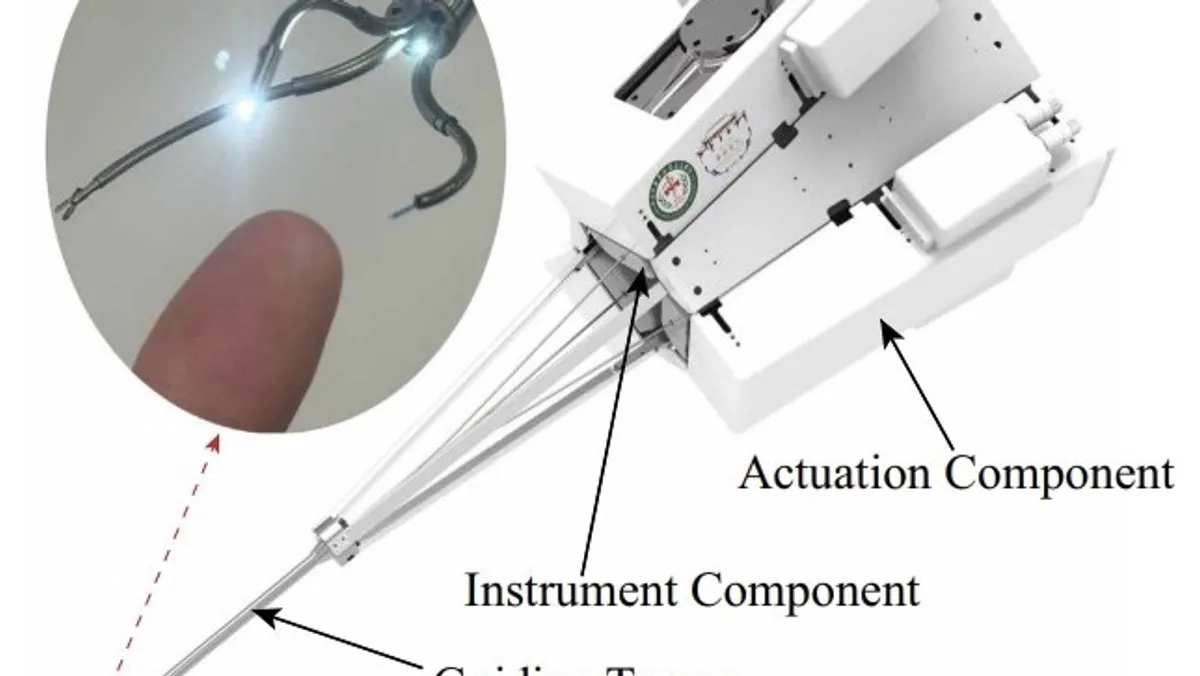
وتحمل المنظومة الجديدة اسم MicroSpine، وهي روبوت جراحي طفيف التوغل يضم 3 أذرع دقيقة تدار عبر وحدة تحكم، وصممت لمساعدة الجراحين على الوصول إلى مناطق محدودة للغاية بين الفقرات القطنية.
ويكتسب هذا التطور أهمية خاصة لأن ضغط الأعصاب الشوكية، لا سيما في أسفل الظهر، يعد من الأسباب الشائعة للألم والإعاقة، وقد يرتبط بأمراض تنكسية تؤثر في ملايين الأشخاص، خصوصاً مع التقدم في العمر.
مساحات يصعب الوصول إليها
عندما تتعرض الأعصاب الخارجة من العمود الفقري للضغط، سواء بسبب انزلاق غضروفي أو تغيرات تنكسية في الفقرات والأنسجة المحيطة، قد يعاني المريض ألماً يمتد من أسفل الظهر إلى الساقين، أو تنميلاً، أو ضعفاً في الحركة.
وفي بعض الحالات لا تكفي العلاجات المحافظة، فيلجأ الأطباء إلى ما يعرف بجراحة إزالة الضغط، وهي عملية تهدف إلى تحرير العصب المضغوط عبر إزالة جزء من النسيج أو القرص أو البنى التي تضغط عليه.
لكن هذه الجراحات ليست بسيطة دائما؛ فالمساحة بين الفقرات القطنية ضيقة، والأعصاب والأوعية الدموية المحيطة بها حساسة، كما أن الأدوات الجراحية التقليدية قد لا تمتلك المرونة الكافية للعمل بدقة داخل هذه المناطق المحدودة.
وتشير المادة البحثية إلى أن التدخلات الحالية قد تكون أحياناً متوسطة الفاعلية فقط، وقد تنطوي على فقدان ملحوظ للدم، ما يجعل تحسين هذه الإجراءات هدفاً مهماً، خصوصاً للمرضى الأكبر سناً أو ذوي المخاطر الجراحية المرتفعة.
3 أذرع في منظومة واحدة
ولمواجهة هذه التحديات، صمم الباحثون نظام MicroSpine بوصفه روبوتاً جراحياً متعدد الأذرع يعمل عبر وحدة تحكم.
وتؤدي كل ذراع وظيفة مختلفة داخل الإجراء الجراحي؛ إذ يحمل النظام منظاراً لتوفير الرؤية داخل موضع العملية، وماسكاً للتعامل مع الأنسجة وتحريكها، وليفاً بصرياً ليزرياً يستخدم في قطع الأنسجة أو كيها عند الحاجة.
ويقول الباحثون إن الفكرة الأساسية ليست فقط إدخال أدوات صغيرة إلى موضع الجراحة، بل منح الجراح قدرة أفضل على التحكم في أكثر من أداة دقيقة داخل مساحة محدودة؛ فبدل الاعتماد على أدوات مستقيمة أو محدودة الحركة نسبياً، يهدف النظام إلى توفير درجة أعلى من البراعة الحركية داخل الفراغات بين الفقرات، وهي نقطة محورية في عمليات تخفيف الضغط عن الأعصاب القطنية.

ويتعامل النظام مع العمود الفقري من الجهة الأمامية للجسم، لا من الجهة الخلفية. ووفق البحث فإن الاقتراب من الأمام معروف بأنه قد يقلل فقدان الدم مقارنة بالنهج الخلفي، لكنه في الوقت نفسه قد يكون صعب التنفيذ يدوياً.
وهنا يحاول الروبوت معالجة مفارقة جراحية واضحة وهي الاستفادة من مزايا الوصول الأمامي مع تقليل صعوبته التقنية عبر أدوات أكثر دقة وتحكماً.
حيوانات وجثث بشرية
وبدأ الباحثون تقييم النظام باستخدام نموذج بشري مطبوع بتقنية ثلاثية الأبعاد، صمم لمحاكاة حالة انزلاق غضروفي بين الفقرات.
وأظهر الاختبار أن MicroSpine استطاع التحرك داخل النموذج والوصول إلى موضع القرص المنفتق بنجاح، وهو ما وفر دليلاً أولياً على قدرة النظام على العمل في بيئة تشبه البنية التشريحية المستهدفة.
بعد ذلك، انتقل الباحثون إلى اختبارات أكثر قرباً من الواقع الجراحي، شملت الخنازير وجثثاً بشرية. وفي كلا النموذجين، أظهر النظام قدرته على تنفيذ تخفيف ناجح لضغط الأعصاب القطنية.
وتعد هذه الخطوة مهمة لأنها تتجاوز مرحلة النماذج الصناعية إلى بيئات تشريحية أكثر تعقيداً، حيث تصبح حركة الأنسجة، وحدود الرؤية، والقيود المكانية أقرب إلى ما قد يواجهه الجراحون في غرفة العمليات.
وتشير النتائج إلى أن الجراحة بمساعدة MicroSpine ارتبطت بفقدان قليل جداً للدم أثناء العملية. كما استغرق الإجراء نحو 15 دقيقة فقط، وهو زمن أقصر بكثير من المدة المعتادة للجراحات القياسية، التي تتراوح بين ساعة وساعة ونصف.
وإذا تأكدت هذه النتيجة في دراسات سريرية لاحقة، فقد يكون تقليل زمن الجراحة وفقدان الدم عاملين مهمين في تحسين التعافي وخفض المخاطر، خاصة لدى المرضى الأكثر هشاشة.
ويرى الباحثون أن هذا النوع من الأنظمة قد يكون مفيداً بشكل خاص للمرضى ذوي الخطورة العالية أو كبار السن الذين قد لا يكونون مرشحين مناسبين للجراحة التقليدية.
فكلما طال زمن العملية وزاد فقدان الدم، ارتفعت الأعباء على الجسم، خصوصاً لدى المرضى الذين يعانون أمراضاً مزمنة أو ضعفاً عاماً أو قدرة محدودة على تحمل التخدير والإجراءات الجراحية الطويلة.
ولا يعني ذلك أن الروبوت سيحل محل الجراح، بل إن النص يقدمه بوصفه نظاماً مساعداً يهدف إلى توسيع قدرة الجراح على العمل داخل مناطق يصعب الوصول إليها يدوياً.
فالمنظار يوفر الرؤية، والماسك يتيح التعامل مع الأنسجة، والليزر يسمح بالقطع والكي، بينما تبقى وحدة التحكم هي الواجهة التي يدير من خلالها الجراح العملية.
نتائج واعدة وقيود
ورغم أهمية النتائج، ما تزال في نطاق الاختبارات قبل السريرية والنماذج البشرية غير الحية، وليست تجربة سريرية على مرضى؛ ما يعني أن الطريق نحو الاستخدام الطبي الواسع يتطلب مراحل إضافية من التقييم، تشمل التأكد من الأمان والفاعلية في عمليات حقيقية، ومقارنة النتائج على نطاق أوسع مع الطرق الجراحية المعتمدة، ورصد المضاعفات المحتملة، ومدى قدرة الجراحين على تعلم استخدام النظام بكفاءة.
كما أن تقليل مدة الإجراء إلى نحو 15 دقيقة في الاختبارات الحالية لا يكفي وحده للحكم النهائي على قيمة التقنية في المرضى الفعليين؛ فنجاح جراحة العمود الفقري لا يقاس بزمن العملية فقط، بل أيضاً بتحسن الألم والوظيفة، واستمرار النتائج بمرور الوقت، وانخفاض الحاجة إلى تدخلات لاحقة، ومستوى الأمان حول الأعصاب والأنسجة الحساسة.
تصنيفات